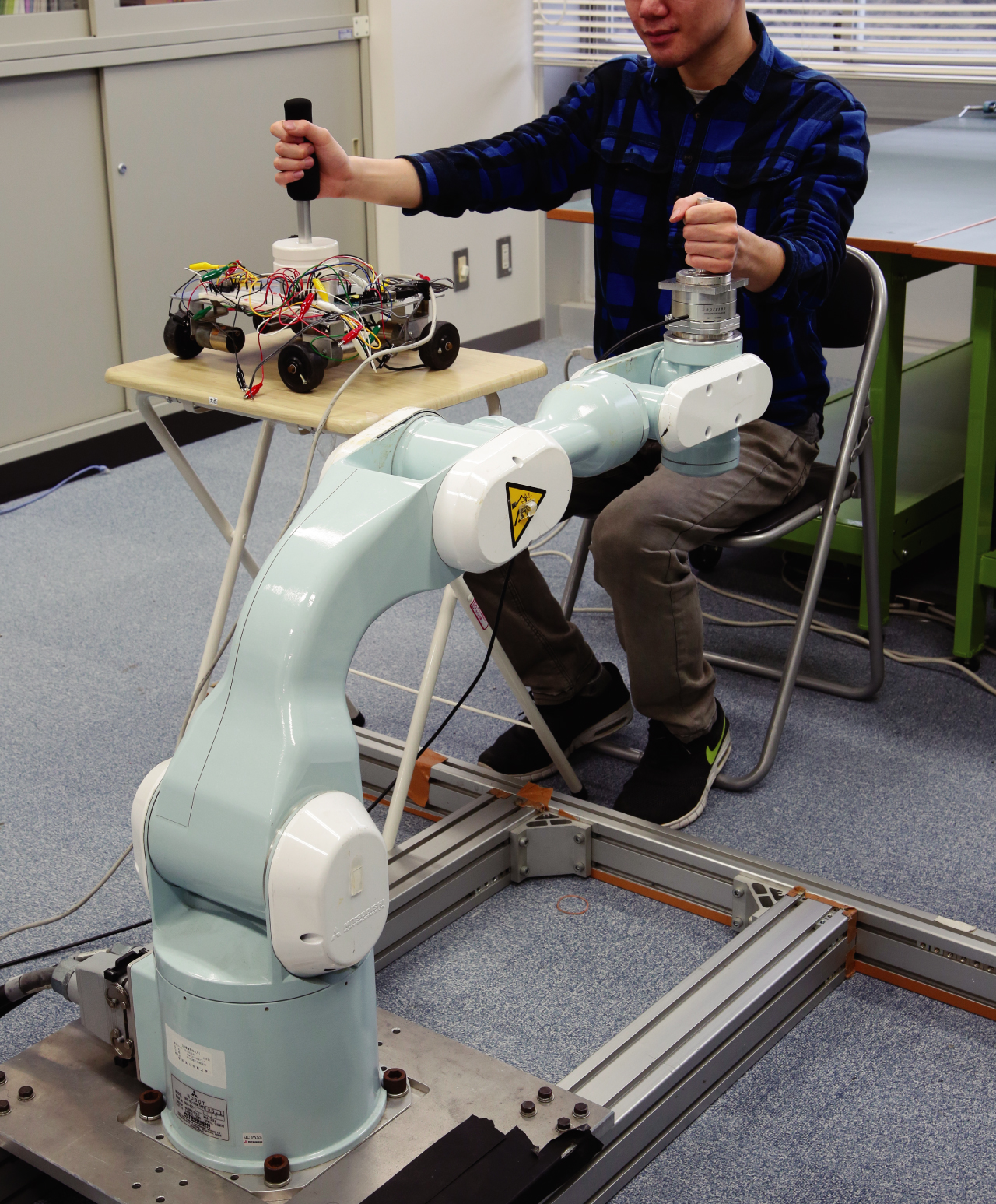
人間の力が足りない時、ロボットがそれをサポートする。その役割が最も期待されている分野の一つが、リハビリテーションだ。ケガや病気で身体の自由がきかなくなった時、その回復を助けるリハビリテーションロボットの研究をしている。筋肉にまったく力が入らない時は、プログラムにしたがって動くことで可動域の確保を助ける。わずかに筋力が残っている時は、小さな入力をアシストするように動く。そして、入力が強い時には抵抗側にまわって、筋力トレーニングの役割を果たす。
バイオメカニクスの理論にしたがって、各関節のトルクを6軸の力覚センサで検出し、動きをサポートするモータを制御するしくみだ。脳卒中で片方の手が麻痺している時、もう片方の手の動きを反転させて麻痺している側に伝えるミラーセラピーなどに効果的だといわれている。理学療法士など、高度な知識と技術を持った専門家のアドバイスを受けながら、共同で研究開発を進めている。